Full Answer
What is arbitration in CAN bus?
Arbitration is the process which decides the owner of CAN bus if two nodes started message broadcasting at the same time. what would happen if more than one node will start transmission at a time on CAN bus? As per CAN standard, two fields of data or remote frame decides the arbitration of CAN message over CAN line – Identifier (11-bit)
What is arbitration in can?
To understand arbitration in CAN let’s understand how data is transmitted in CAN. Data is transmitted by nodes on the bus in form of frames. The frame has multiple fields but we are only interested in the first two fields, SOF and Identifier. SOF is a bit used to signal start of a frame to all other nodes on the bus.
What is message arbitration and why is it important?
The message arbitration (the process in which two or more CAN controllers agree on who is to use the bus) is of great importance for the actually available bandwidth for data transmission. Any CAN controller may start a transmission when it has detected an idle bus.
Who decides the arbitration of can message over can line?
As per CAN standard, two fields of data or remote frame decides the arbitration of CAN message over CAN line – ECU1 with identifier 0x234 and ECU2 with Identifier 0x352 transmit data frame at a time. who will transmit data first? Ans: ECU2 will win the arbitration first as CAN bus follow wired And logic.

What is arbitration process in CAN protocol?
The message arbitration (the process in which two or more CAN controllers agree on who is to use the bus) is of great importance for the really available bandwidth for data transmission. Any CAN controller may start a transmission when it has detected an idle bus.
How many arbitration bits are used in CAN bus?
There are numerous variations of the CAN bus specifically CAN 2.0A (11-bit arbitration field) and CAN 2.0B (29-bit arbitration field). The other variations are primarily higher-level protocols that exist at OSI layers 3 through 7. All use standard CAN layers 1 and 2.
What is CAN protocol and its uses?
The CAN communication protocol is a carrier-sense, multiple-access protocol with collision detection and arbitration on message priority (CSMA/CD+AMP). CSMA means that each node on a bus must wait for a prescribed period of inactivity before attempting to send a message.
What is difference between CAN and can FD?
The primary difference between the classical CAN (Controller Area Network) and CAN FD is the Flexible Data (FD). Using CAN FD, Electronic Control Units (ECUs) can dynamically switch to different data-rate and with larger or smaller message sizes.
What are the four types of bus arbitration?
Bus arbitration schemes can be divided into four broad classes:Daisy chain arbitration.Centralized arbitration.Distributed arbitration by self-selection:Distributed arbitration by collision detection (e.g. Ethernet)
What are the two types of bus arbitration?
There are two approaches to bus arbitration:Centralized bus arbitration – A single bus arbiter performs the required arbitration.Distributed bus arbitration – All devices participating in the selection of the next bus master.
What is the advantage of CAN protocol?
The CAN protocol eliminates the need for excessive wiring by allowing electronic devices to communicate with each other along a single multiplex wire that connects each node in the network to the main dashboard.
CAN protocol examples?
By the mid-1990s, CAN was the basis of many industrial device networking protocols, including DeviceNet and CANOpen. Examples of CAN devices include engine controller (ECU), transmission, ABS, lights, power windows, power steering, instrument panel, and so on.
CAN protocol types?
There are four types of CAN messages, or “frames:” Data Frame, Remote Frame, Error Frame and Overload Frame. The data frame is the standard CAN message, broadcasting data from the transmitter to the other nodes on the bus. A remote frame is broadcast by a transmitter to request data from a specific node.
How much faster is FD CAN than HS CAN?
CAN FD provides a significant speed increase above classical HS-CAN networks, accelerating bit rates from previously 500 kbps up to 2 or 5 Mbps in the data phase of the CAN FD frame.
CAN FD disadvantages?
The downside is that the increased data load causes longer delays between CAN frames, though this can be compensated for by using a higher bit-rate. There are more overhead bits in CAN FD so that even with less than 8 bytes of data, CAN FD frames are some longer in time than Classical CAN frames.
CAN protocol baud rate?
For a CAN bus, which is a serial, multi-master bus, if the baud rate is mentioned as “500000 baud”, that port on CAN can transfer a maximum of 500000 bits per second. Various software allows the user to set the bus speed depending upon the need of the CANbus.
What is bit arbitration in CAN?
Arbitration. The arbitration field of the CAN message consists of an 11- or 29-bit identifier and a remote transmission (RTR) bit. The CAN arbitration scheme is called “carrier sense multiple access with collision detection” or CSMA/CD, and assures that the highest priority message is broadcast.
CAN bus ID arbitration?
Arbitration is the process which decides the owner of CAN bus if two nodes started message broadcasting at the same time . what would happen if more than one node will start transmission at a time on CAN bus? ECU1 with identifier 0x234 and ECU2 with Identifier 0x352 transmit data frame at a time.
CAN bus 11 bit ID?
An 11-bit identifier (standard format) allows a total of 211 (= 2048) different messages. A 29-bit identifier (extended format) allows a total of 229 (= 536+ million) messages. Both formats, standard (11-bit message ID) and Extended (29-bit message ID), may co-exist on the same CAN bus.
How many types of bus arbitration are there?
Types of Bus Arbitration There are three arbitration schemes which run on centralized arbitration. a) Daisy Chaining − It is a simple and cheaper method where all the masters use the same line for making bus requests. b) Polling Method − In this method, the controller is used to generate address lines for the master.
Latest Questions
Eliminate render-blocking resources: Resources are blocking the first paint of your page. Consider delivering critical JS/CSS inline and deferring all non-critical JS/styles. Resources that may be contributing to render-blocking include: asked by Anonymous
Data Structures Coding Questions Asked In Online Test In 2022
Hello guys, welcome back to my blog. In this article, I will share data structures coding questions asked in an online test in 2022, or coding questions on data structures on algorithms.
Popular Questions
According to the Creator principle of the GRASP approach to object-oriented design, the class that's responsible for creating new objects in a program should possess several characteristics. Which of the following are the characteristics? asked by Anonymous
How does collision detection work in CAN?
Now let’s discuss how collision detection and bit wise arbitration work in CAN. For example two nodes start transmitting at same time both will transmit SOF bit at same time this will have no effect on arbitration, after that they start transmitting identifier. Each node transmits a bit and then observes the bus if the data it sent is same as data it sensed and it continues to transmit the identifier. When the nodes observes that the bit it transmitted and the bit it sensed back are not same it knows that a higher priority message is being transmitted on the bus and it starts listening and stops transmitting. It happens because in case of different bits the node with lower identifier will continue transmitting as it will drive the bus to dominant state (logical 0) while the other node that intends to keep it in default state (recessive state, logical 1), will read back the dominant state on the bus and stop transmitting. This mechanism thus preserves the data as the frame with lower priority is not corrupted due to simultaneous transmissions.
How is data transmitted in CAN?
To understand arbitration in CAN let’s understand how data is transmitted in CAN. Data is transmitted by nodes on the bus in form of frames. The frame has multiple fields but we are only interested in the first two fields, SOF and Identifier. SOF is a bit used to signal start of a frame to all other nodes on the bus. The 2nd field is the Identifier which is identifier for the type of message to be transmitted in the frame. The lower the identifier higher the priority of the message. MSB is always transmitted first on the bus. CAN bus has two states a recessive state (logic level 1) and a dominant state (logic level 0). The bus is always in the recessive state by default (i.e. using pull up resistors), so when a node has to transmit one it leaves the bus in default state and when it has to transmit zero it drive the bus to dominant state.
What is SOF in a bus?
SOF is a bit used to signal start of a frame to all other nodes on the bus. The 2nd field is the Identifier which is identifier for the type of message to be transmitted in the frame. The lower the identifier higher the priority of the message. MSB is always transmitted first on the bus.
Why does a node with lower identifier continue transmitting?
It happens because in case of different bits the node with lower identifier will continue transmitting as it will drive the bus to dominant state (logical 0) while the other node that intends to keep it in default state (recessive state, logical 1), will read back the dominant state on the bus and stop transmitting.
What is CAN in a network?
CAN is a carrier sense multiple access protocol , which in simple terms means that each nodes observes the bus before transmitting data on it, if it detects that there is some data on bus it doesn’t transmit its own data and waits for some predefined time and then tries again.
How many states does a CAN bus have?
CAN bus has two states a recessive state (logic level 1) and a dominant state (logic level 0). The bus is always in the recessive state by default (i.e. using pull up resistors), so when a node has to transmit one it leaves the bus in default state and when it has to transmit zero it drive the bus to dominant state.
What is CAN protocol?
CAN protocol is widely used in automotive industry. It is different from other communication protocols used in embedded systems like SPI, as it is a multi-master, message based protocol, which means that more than one node on the bus can initiate a data transfer.
What is the CRC field in a data frame?
CRC field: The data frame also contains a cyclic redundancy check field of 15 bit, which is used to detect the corruption if it occurs during the transmission time. The sender will compute the CRC before sending the data frame, and the receiver also computes the CRC and then compares the computed CRC with the CRC received from the sender. If the CRC does not match, then the receiver will generate the error.
When does the bus remain dominant?
From the above scenario, we get to know that the dominant state overwrites the recessive state. When the node sends the dominant and the recessive bit simultaneously, then the bus remains dominant. The recessive level occurs only when all the nodes send the recessive bit. Such logic is known as AND logic, and physically it is implemented as an open collector circuit.
Which node has a recessive bit?
9 th bit: Node 1 has recessive bit while other nodes have a dominant bit, so the bus will also remain dominant. In this case, node 1 has lost the arbitration, so it stops sending bits.
What happens if the CRC does not match?
If the CRC does not match, then the receiver will generate the error. ACK field: This is the receiver's acknowledgment. In other protocols, a separate packet for an acknowledgment is sent after receiving all the packets, but in case of CAN protocol, no separate packet is sent for an acknowledgment.
What does SOF mean in network?
SOF: SOF stands for the start of frame, which indicates that the new frame is entered in a network. It is of 1 bit.
What is broadcasting in computer?
Here, broadcast means that the information is transmitted to all the nodes. The node can be a sensor, microcontroller, or a gateway that allows the computer to communicate over the network through the USB cable or ethernet port. The CAN is a message-based protocol, which means that message carries the message identifier, ...
What does CAN stand for in computer?
CAN stands for Controller Area Network protocol. It is a protocol that was developed by Robert Bosch in around 1986. The CAN protocol is a standard designed to allow the microcontroller and other devices to communicate with each other without any host computer. The feature that makes the CAN protocol unique among other communication protocols is ...
What is error handling in CAN?
Error handling is built into in the CAN protocol and is of great importance for the performance of a CAN system. The error handling aims at detecting errors in messages appearing on the CAN bus, so that the transmitter can retransmit an erroneous message. Every CAN controller along a bus will try to detect errors within a message. If an error is found, the discovering node will transmit an Error Flag, thus destroying the bus traffic. The other nodes will detect the error caused by the Error Flag (if they haven’t already detected the original error) and take appropriate action, i.e. discard the current message.
What is CAN bus?
The CAN bus is a broadcast type of bus. This means that all nodes can ‘hear’ all transmissions. There is no way to send a message to just a specific node; all nodes will invariably pick up all traffic. The CAN hardware, however, provides local filtering so that each node may react only on the interesting messages.
How fast can a low speed CAN go?
Low-speed CAN (ISO 11898-3, see above) can go up to 125 kbit/s.
What is the purpose of a remote frame?
there is no Data Field. The intended purpose of the Remote Frame is to solicit the transmission of the corresponding Data Frame.
How many bits are in a CAN?
The new format is often called Extended CAN and allows no less than twenty-nine (29) bits in the Identifier. To differentiate between the two frame types, a reserved bit in the Control Field was used.
What is the maximum utility load of a CAN message?
The CAN messages. CAN uses short messages – the maximum utility load is 94 bits. There is no explicit address in the messages; instead, the messages can be said to be contents-addressed, that is, their contents implicitly determines their address. Message Types.
How many parts are in a CAN video course?
Our updated 8-part video course sets a new standard in CAN training.
Why is message arbitration important?
The message arbitration (the process in which two or more CAN controllers agree on who is to use the bus) is of great importance for the really available bandwidth for data transmission.
What is a conventional message address?
A conventional message address would be used like “Here’s a message for node X”. A contents-addressed message is like “Here’s a message containing data labeled X”. The difference between these two concepts is small but significant.
What is the Arbitration Field used for?
The contents of the Arbitration Field is, per the Standard, used to determine the message’s priority on the bus. All CAN controllers will also use the whole (some will use just a part) of the Arbitration Field as a key in the hardware filtration process.
Is there a message address in CAN?
In fact, there is no notion of message addresses in CAN. Instead, the contents of the messages is identified by an identifier which is present somewhere in the message. CAN messages are said to be “contents-addressed”. A conventional message address would be used like “Here’s a message for node X”.
Can controllers communicate with CAN controllers?
Of course, a “Full CAN” controller can communicate with a “Basic CAN” controller and vice versa. There are no compatibility problems.
Is there an explicit address in CAN messages?
It is worth noting once again that there is no explicit address in the CAN messages. Each CAN controller will pick up all traffic on the bus, and using a combination of hardware filters and software, determine if the message is “interesting” or not.
What is CSMA in communication?
CSMA is a carrier sense, multiple-access protocol in which node verifies the absence of traffic before transmitting on a shared medium such as electrical bus. In CSMA each node on a bus waits for a specific time before sending the message. Once this wait period is over every node has equal opportunity to send the message. Based on pre-programmed priority of each message in identifier field i.e. highest priority identifier wins the bus access. It is implemented on the physical layer of OSI model. Let us understand CSMA with an example. In a discussion every person gets an equal opportunity to voice their thoughts however when a person is talking others keep quiet and listens and waits for their chance to speak (carrier sense). But if two or more people start speaking at the same time then they detect the fact and quit speaking (collision detection).
What is CAN controller?
The CAN controller converts messages from the nodes per the CAN protocols, which are then transmitted via the CAN transceiver over the serial bus — and vice versa. The controller is a chip that’s embedded inside the host controller of the node or added separately.
What is a message in CAN?
A Message is packet of data that carries the information to be exchanged between the nodes. Each message in CAN has a unique identification number. The identification number is specified according to the content of the message and stored in message identifier. This identification number is also unique within the network so when the transmitting node places the data on the network for access to all nodes it checks unique ID number to allow the message to pass through the filter and rest are ignored. This is done to save the time spent on sorting. With message based protocol other nodes can be added without re-programming since the units connected to the bus have no identifying information like node addressing. So there is no change needed in the software and hardware of any of the units connected on the bus.
What is bit stuffing?
Bit stuffing – It is a very common technique used in telecommunication and data transmission to insert non -informative bits to have same bit rates or to fill the frames .The se extra bits are removed by data link layer to retrieve the original message. This same technique is used in bit error.CAN bus is never idle because it uses NRZ method. After five consecutive bits of the same value, a bit with a complement or opposite value is stuffed into the bit stream. If six bits of the same value are detected between SOF and CRC delimiter, error frame is generated. Upon detection of errors, the transmission is aborted and frame is repeated. If errors continue, then the station or node may switch itself off to prevent the bus from being tied up.
How many methods of error checking are there in CAN?
This is one of the attributes of CAN that makes it robust. CAN protocol has five methods of error checking, out of which three are at message level while other two are at bit level. Every frame is simultaneously accepted or rejected by every node in the network. If a node detects an error it transmits an error flag to every node and destroys the transmitted frame and the transmitting node resends the frame
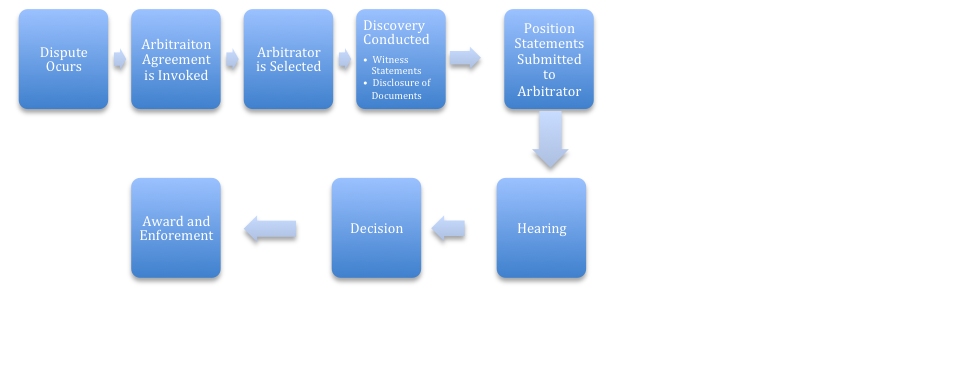
How does a CAN network work?
Every electronic device (or node) that communicates via the CAN protocol is connected with one another through a common serial bus, which allows for the transfer of messages. For this data exchange to occur, the nodes first require the necessary hardware and the software. Various nodes present in a CAN network.
What is a protocol set rule?
The protocol set rules by which electronic devices can exchange information with one another over a common serial bus. It reduced the wiring connections and the overall complexity of the system.
What is the identifier of ECU1?
ECU1 with identifier 0x234 transmit data frame while ECU2 with same Identifier 0x234 transmit a remote frame at a time. who will win arbitration?
What is acceptance filter?
Acceptance filter is a CAN ID which is allowed to receive at Node. Every Message with this CANId will receive at this node if mask register is correctly configured.
What is the process that decides the owner of a CAN bus?
Arbitration is the process which decides the owner of CAN bus if two nodes started message broadcasting at the same time .
Is 3rd bit dominant or recessive?
So as you can see that 3rd bit of identifier is dominant (0) of ECU1 while recessive in ECU2. as we know the final value at CAN will decide through wired And logic so final value is ‘0’.Every node which transmits its data at CAN Bus read it back to verify the correct transmission and it is called “Bit Monitoring”.if the data read is not same as transmitted then it will detect the transmission error and stop transmission. So if we relate this theory with above example then ECU2 will not read exactly what it transmitted because the final value is 0 at CAN line and that’s why it will stop transmission and ECU1 will continue its transmission.so its the concept of arbitration.
Can a node listen to a message?
As per CAN standard any node can transmit a message on CAN line and every node present on CAN line including transmitter itself can listen to this message but the who can accept the broadcasted messages decided by a field of the transmitted frame which is known as Identifier.
How are data frames separated from remote frames?
Data frames and remote frames are separated from preceding frames by a bit field called interframe space . Interframe space consists of at least three consecutive recessive (1) bits. Following that, if a dominant bit is detected, it will be regarded as the "Start of frame" bit of the next frame. Overload frames and error frames are not preceded by an interframe space and multiple overload frames are not separated by an interframe space. Interframe space contains the bit fields intermission and bus idle, and suspend transmission for error passive stations, which have been transmitter of the previous message.
Why do we need to use bit stuffing?
To ensure enough transitions to maintain synchronization, a bit of opposite polarity is inserted after five consecutive bits of the same polarity. This practice is called bit stuffing, and is necessary due to the non-return to zero (NRZ) coding used with CAN. The stuffed data frames are destuffed by the receiver.
What is CAN in electronics?
CAN is a multi-master serial bus standard for connecting electronic control units (ECUs) also known as nodes ( automotive electronics is a major application domain). Two or more nodes are required on the CAN network to communicate. A node may interface to devices from simple digital logic e.g. PLD, via FPGA up to an embedded computer running extensive software. Such a computer may also be a gateway allowing a general purpose computer (like a laptop) to communicate over a USB or Ethernet port to the devices on a CAN network.
What is high speed CAN?
High-speed CAN is usually used in automotive and industrial applications where the bus runs from one end of the environment to the other. Fault-tolerant CAN is often used where groups of nodes need to be connected together.
What is CAN bus?
The CAN bus protocol has been used on the Shimano DI2 electronic gear shift system for road bicycles since 2009, and is also used by the Ansmann and BionX systems in their direct drive motor.
What is hill hold on electric brakes?
Electric park brakes: The "hill hold" functionality takes input from the vehicle's tilt sensor (also used by the burglar alarm) and the road speed sensors (also used by the ABS, engine control and traction control) via the CAN bus to determine if the vehicle is stopped on an incline. Similarly, inputs from seat belt sensors (part of the airbag controls) are fed from the CAN bus to determine if the seat belts are fastened, so that the parking brake will automatically release upon moving off.
Why is synchronization important in CAN?
Synchronization is important during arbitration since the nodes in arbitration must be able to see both their transmitted data and the other nodes' transmitted data at the same time. Synchronization is also important to ensure that variations in oscillator timing between nodes do not cause errors.