Tutorials(2f)Simulation(20)in(20)Gazebo/Gazebo_001.png)
Full Answer
How to integrate stand-alone gazebo with Ros?
For ROS 2, see ROS 2 integration overview. To achieve ROS integration with stand-alone Gazebo, a set of ROS packages named gazebo_ros_pkgs provides wrappers around the stand-alone Gazebo. They provide the necessary interfaces to simulate a robot in Gazebo using ROS messages, services and dynamic reconfigure Some features of gazebo_ros_pkgs:
What is gazebo?
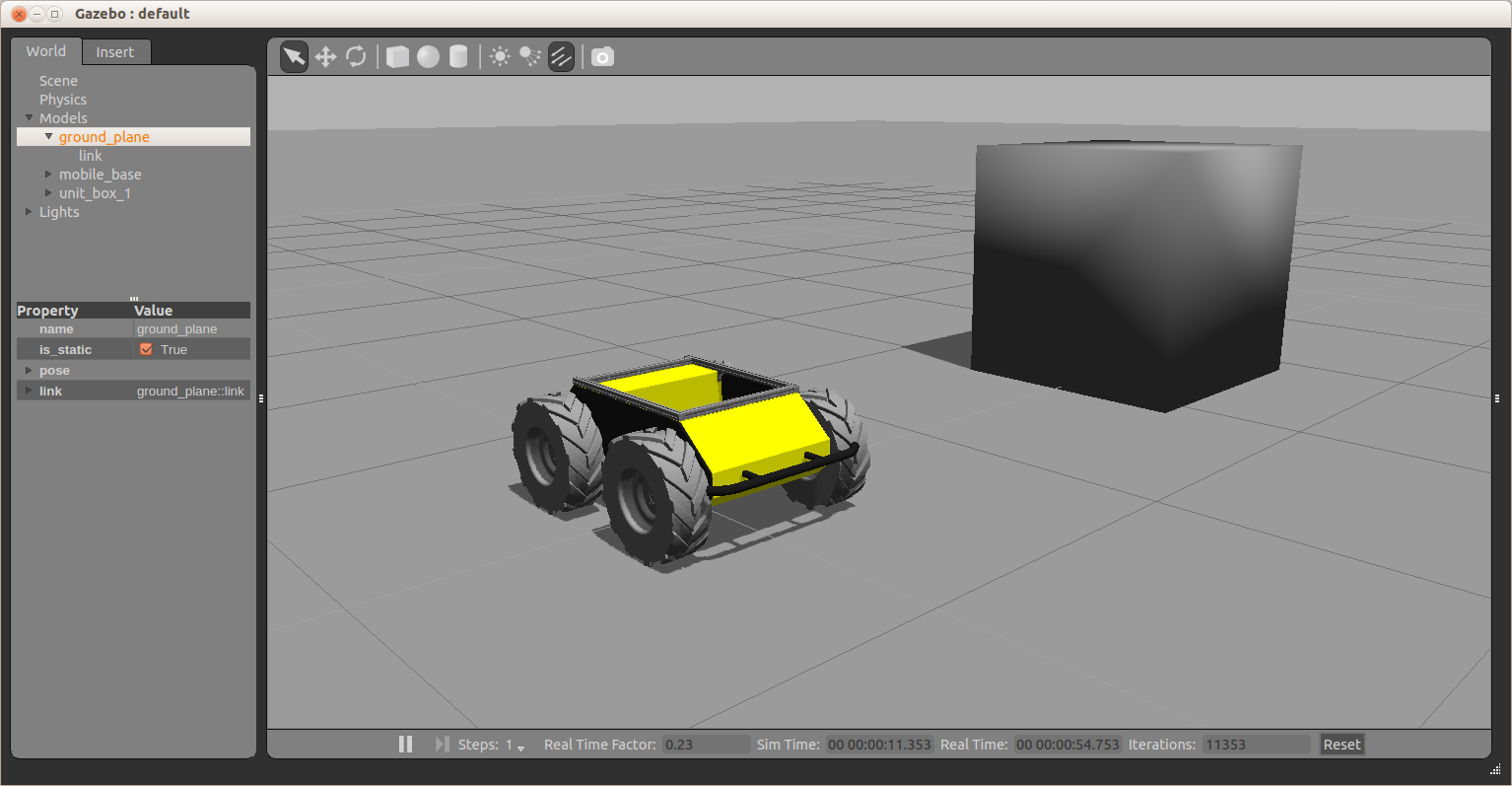
What is Gazebo? Gazebo is a 3D robot simulator. Its objective is to simulate a robot, giving you a close substitute to how your robot would behave in a real-world physical environment. It can compute the impact of forces (such as gravity). Here is my tutorial on how to launch Gazebo. So What is the Difference?
What is gazebo_Ros_PKGs?
The ROS 2 package gazebo_ros_pkgs is a metapackage which contains the following packages: gazebo_dev: Provides a cmake configuration for the default version of Gazebo for the ROS distribution. So downstream packages can just depend on gazebo_dev instead of needing to find Gazebo by themselves.
What is the difference between rviz and gazebo?
The difference between the two can be summed up in the following excerpt from Morgan Quigley (one of the original developers of ROS) in his book Programming Robots with ROS: “ rviz shows you what the robot thinks is happening, while Gazebo shows you what is really happening.”
What is the purpose of Gazebo in ROS?
Gazebo is a 3D simulator, while ROS serves as the interface for the robot. Combining both results in a powerful robot simulator. With Gazebo you are able to create a 3D scenario on your computer with robots, obstacles and many other objects. Gazebo also uses a physical engine for illumination, gravity, inertia, etc.
How do you use a ROS and a Gazebo?
Go through these first to learn the basics of using Gazebo.Installing and Starting Gazebo. How to get Gazebo up and running.Creating and Spawning Custom URDF Objects in Simulation. ... Gazebo ROS API for C-Turtle. ... Simulate a Spinning Top. ... Gazebo Plugin Intro. ... Create a Gazebo Plugin that Talks to ROS.
What is Gazebo computer?
Gazebo is a 3D dynamic simulator with the ability to accurately and efficiently simulate populations of robots in complex indoor and outdoor environments. While similar to game engines, Gazebo offers physics simulation at a much higher degree of fidelity, a suite of sensors, and interfaces for both users and programs.
What is Gazebo Linux?
Gazebo is a powerful 3D simulation environment for autonomous robots that is particularly suitable for testing object-avoidance and computer vision. This page describes its use with SITL and a single vehicle. Gazebo can also be used with HITL and for multi-vehicle simulation.
What can Gazebo do?
Gazebo is a powerful robot simulator used by industry and academia that calculates physics, generates sensor data and provides convenient interfaces.
Does Gazebo require GPU?
System requirements Gazebo is currently best used on Ubuntu, a flavor of Linux. You will need a computer that has: A dedicated GPU, Nvidia cards tend to work well in Ubuntu.
What engine does gazebo use?
Currently Gazebo supports 4 physics engines: ode , bullet , simbody and dart . The default physics engine is ode .
What is the difference between gazebo and pavilion?
While many gazebos are octagonal or oval, most pavilions are designed to be long and rectangular. Additionally, while a gazebo is more of a self-contained structure, pavilions are commonly used to provide a roof for a patio or seating area below. Pavilions can also be confused with pergolas.
Can gazebo run on Windows?
Windows is not a fully officially supported platform by Open Robotics for Gazebo. Open Robotics guarantees that the code is compatible with compilations on Windows but there are no packages officially available. Since Gazebo is open source, the Gazebo Community provides distribution using different projects.
Where is Gazebo installed?
Default source install : /usr/local/bin/gazebo.
Is Gazebo simulator open source?
Gazebo is an open-source 3D robotics simulator. It integrated the ODE physics engine, OpenGL rendering, and support code for sensor simulation and actuator control.
How much is a Gazebo?
Prices usually range from $4,000 to $40,000. Pergolas start at $4,000 and average about $8,000. Gazebos start at $4,000 and average about $12,000. Pavilions start at $4,000 and average about $16,000.
How do you use ROS control?
ROS controlAdd transmission elements to a URDF.Add the gazebo_ros_control plugin.RRBot Example.Create a ros_controls package.Start the controllers using roslaunch.Manually send example commands.Use RQT To Send Commands.Connect Rviz to Gazebo Simulation.
How do you start a Gazebo simulation?
Run GazeboInstall Gazebo.Open a terminal. On most Ubuntu systems you can press CTRL+ALT+t.Start Gazebo by entering the following at the command prompt. gazebo. Note: The first time you launch gazebo, it will try to download a couple of models so this process may take some time.
What is the difference between RVIZ and Gazebo?
... Gazebo is a real-world physics simulator that creates a world and simulates the robot, whereas the rviz is visualization software that can read and display the data from Gazebo or real-world sensors.
How do I open a URDF in Gazebo?
Nonfunctional Gazebo InterfaceLoads the urdf from the macro tutorial into the parameter description (as before)Launches an empty gazebo world.Runs the script to read the urdf from the parameter and spawn it in gazebo.By default, the gazebo gui will also be displayed, and look like this:
What is Gazebo used for?
Gazebo is a powerful robot simulator used by industry and academia that calculates physics, generates sensor data and provides convenient interfaces. Open source software is lowering the barrier to entry and speeding up progress in robotics.
How does Gazebo work?
Dolly’s city environment, for example, was constructed using a combination of eRuby scripts, the UI’s 3D view, and widgets that provide detailed information about every model in the scene. While the simulation is running, the 3D view is also a handy way to visualize the laser scans, as well as introspect various other aspects such as the position of joints, center of mass, and even moments of inertia. This ability of simulation to provide an aerial x-ray-view of the scene can be extremely helpful when iterating on algorithms, and is something that’s hard, if not impossible, to get in the real world.
What is a RQT in ROS 2?
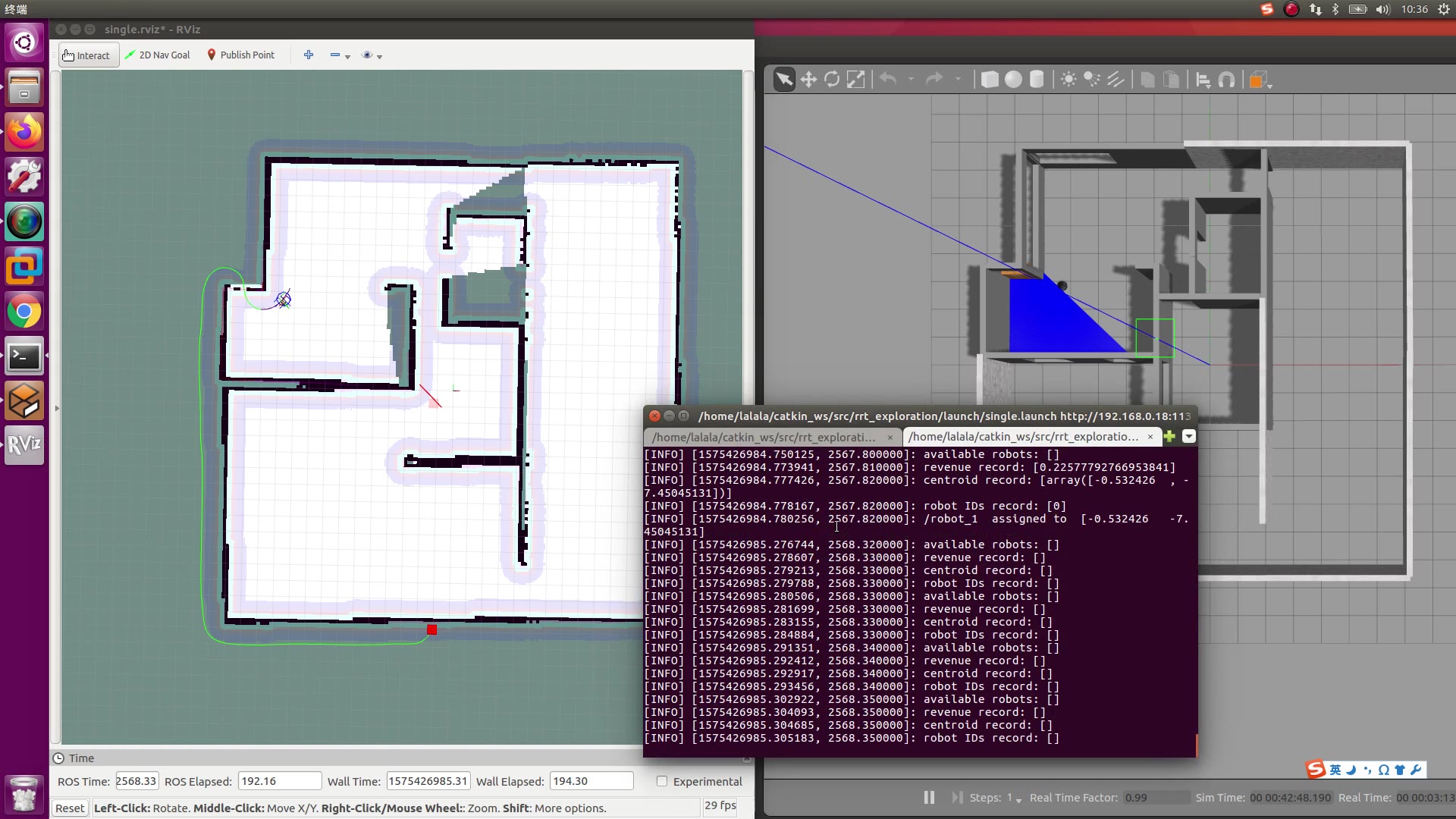
In addition to the messaging system, ROS 2 provides powerful developer tools. For example, RViz is a visualizer for ROS topics that is invaluable during application development and debugging. It has a 3D scene in which data from any part of the application can be displayed together, such as point clouds and coordinate frames. RViz also provides control interfaces such as 3D markers that can be dragged to move a real robot. RQt is another handy graphical tool that lets developers quickly put together widgets to interact with any aspect of their robotics application, be it simulated or not. The image below shows Dolly’s laser scans in RViz alongside Gazebo’s view showing the visualization within simulation. RViz will display scans the same way, regardless of whether they’re simulated or coming from hardware.
How many sensors does Gazebo have?
Dolly is equipped with a single sensor, the laser scanner, but Gazebo supports over a dozen sensors, such as color and depth cameras, IMU, and GPS. Developers are also able to create new sensors through a C++ API.
What is the purpose of ROS 2?
ROS 2 is being developed with the goal of offering a standard software platform to industry and academia that will support them from research and prototyping up to deployment and production. ROS 2 builds on the success of ROS 1, which is already used today in various robotics applications all over the world.
How to describe the worlds in Gazebo?
Worlds in Gazebo are described using the Simulation Description Format. SDF is an XML format that allows specification of every aspect of simulation, from the spring on Dolly’s waggy tail to the color of the sun light. Users can combine 3D models from an online database with their own custom ones to create various environments for their robots. In fact, the whole city environment around Dolly is composed of free models found in the Ignition Fuel online database. Dolly itself is a custom model, and all its details can be tweaked and improved through the UI or directly in its SDF file.
Who is the developer of ROS 2?
Development of ROS 2 is led by Open Robotics, the company that also maintains the robot simulator where Dolly lives, called Gazebo, as well as other open source robot software and hardware. These projects are distributed under permissive open source licenses such as BSD and Apache 2.0, which makes them attractive to academia and industry alike.
What is Gazebo simulation?
Gazebo is a leader in robot simulation. It is a tool relied upon by hundreds of thousands of users and developers around the world. Perhaps you have heard “Gazebo simulation” many times, but you don’t know exactly what it is or how it works.
What is a gzserver?
gzserver – the “work horse” Gazebo program – it reads the world file to generate and populate a world.
What is Gazebo?
Gazebo is a 3D robot simulator. Its objective is to simulate a robot, giving you a close substitute to how your robot would behave in a real-world physical environment. It can compute the impact of forces (such as gravity).
What is the Difference Between rviz and Gazebo?
After all, both programs enable you to view a simulated robot in 3D. Let’s take a look at how they’re different.
What is the purpose of Rviz?
The purpose of rviz is to enable you to visualize the state of a robot. It uses sensor data to try to create an accurate depiction of what is going on in the robot’s environment. To launch rviz, type the following command in your terminal: And in a different terminal tab, type: